
{kind=link}
Robotic fabrication in a single step with a desktop 3D printer and pressurised fuel.
Delicate robotics are designed to emulate the complicated motions of dwelling creatures. Made of strong however compliant supplies, they’re extra adaptable to their surroundings and current a decrease threat of damaging the issues and other people they work together with than their arduous counterparts.
Important funding of their supplies design and fabrication has seen tender robots set up themselves in additional delicate fields akin to healthcare (together with surgical instruments and assistants, prostheses, and different wearable applied sciences) and for exploration and surveillance in locations the place it wasn’t beforehand potential. The sticking level for shifting these applied sciences ahead has been their degree of complexity: they’re multi-component programs product of many alternative supplies organized into sophisticated geometries, requiring costly multi-step manufacturing and exterior management programs to co-ordinate movement.
Slightly than the usual cast-moulding with silicone, researchers are turning to 3D printing for an answer. “With 3D printing, complexity is free – it takes about as a lot time and power to print a strong block of fabric because it does to print our robots,” says Michael Tolley, director of the Bioinspired Robotics and design Lab on the College of California San Diego. “The problem is producing the complicated designs.”
3D printed pneumatic circuits now developed by Tolley, Yichen Zhai, and colleagues at UCSD and BASF don’t require any guide post-processing meeting. In contrast to earlier makes an attempt to leverage such strategies, their robot can be manufactured in a single step, utilizing nothing greater than a desktop 3D printer.
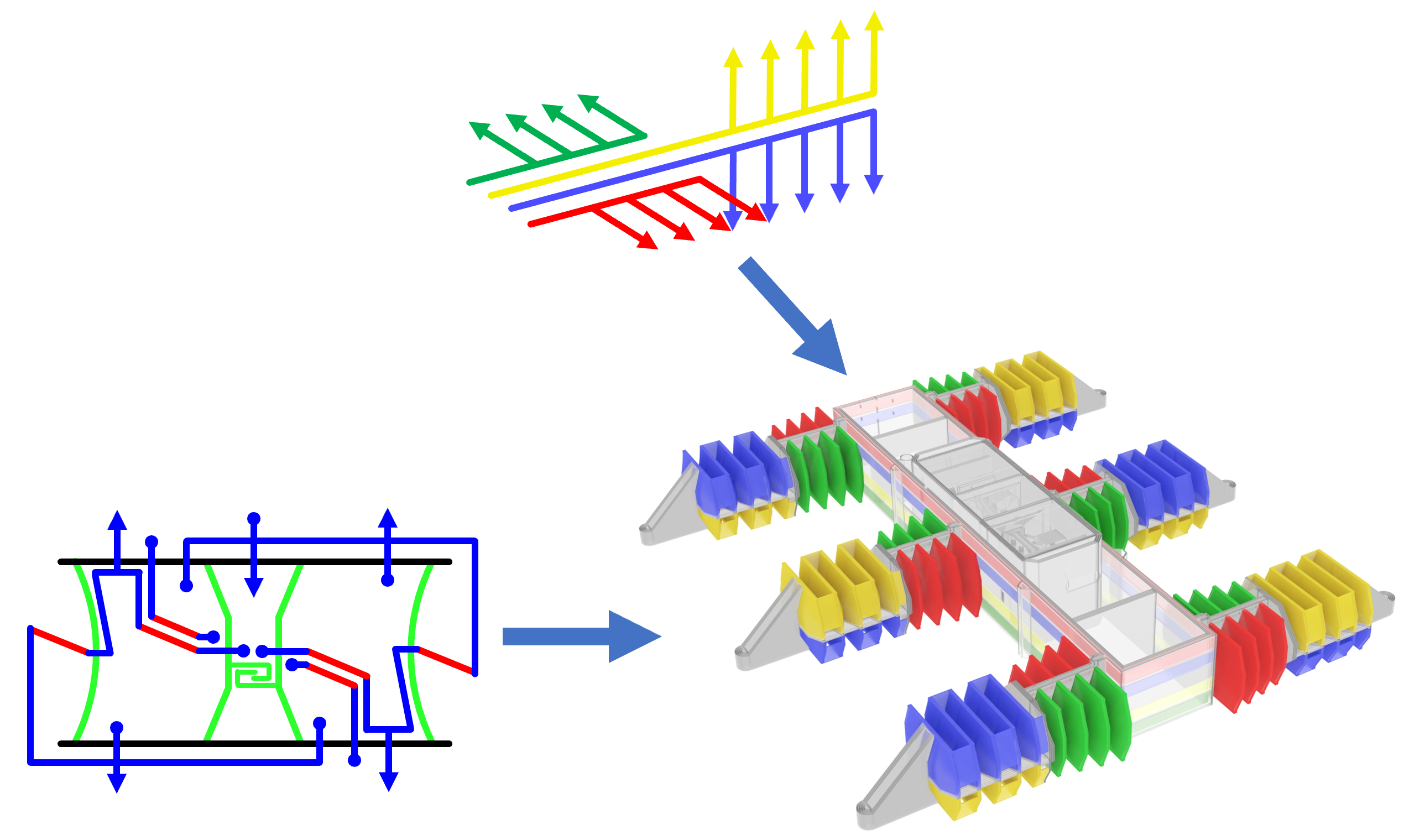
The important thing lies within the design of their pneumatic valve system.
“A key achievement was designing this valve so it may very well be printed in a impartial state (no channels kinked, which might trigger them to fuse shut),” the researchers clarify. “When pressurized, the valve initialized itself (self-primed) into part of its cycle (with some valves closed), earlier than it started to oscillate.”
 design for the brand new tender robotic.” class=”wp-image-119557″ srcset=”https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1.png 2539w, https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1-1280×766.png 1280w, https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1-980×586.png 980w, https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1-480×287.png 480w” sizes=”(min-width: 0px) and (max-width: 480px) 480px, (min-width: 481px) and (max-width: 980px) 980px, (min-width: 981px) and (max-width: 1280px) 1280px, (min-width: 1281px) 2539px, 100vw”/>
design for the brand new tender robotic.” class=”wp-image-119557″ srcset=”https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1.png 2539w, https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1-1280×766.png 1280w, https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1-980×586.png 980w, https://www.advancedsciencenews.com/wp-content/uploads/2025/06/aisy202400876_airbot_figure1-480×287.png 480w” sizes=”(min-width: 0px) and (max-width: 480px) 480px, (min-width: 481px) and (max-width: 980px) 980px, (min-width: 981px) and (max-width: 1280px) 1280px, (min-width: 1281px) 2539px, 100vw”/>Cheaper, less complicated manufacturing is already an enormous benefit, however their new design has resolved one other drawback, too.
As a result of earlier pneumatic programs relied on single, bistable valves or a three-phase ring oscillator as a management unit, the ensuing part shifts have been uneven, resulting in a clumsy and inefficient gait and severely limiting the sensible software of the robots. The brand new design produces symmetric part shifts by producing 4 cyclic output alerts from one fixed strain enter. “We designed it to be very sturdy to completely different enter pressures,” says Tolley, “to work with quite a lot of air-powered muscle mass and to deal with completely different utilized masses. This makes it very best for controlling strolling gaits.”
They demonstrated this secure, autonomous movement with a sig-legged robotic. The one printing step to provide it, which they examined on completely different 3D printer fashions, took about 58 hours; thereafter, they used a 16 g CO2 cartridge with a mechanical regulator at 20 psi to energy their pneumatic circuit and the robotic managed to climb 73 cm up an uneven hill in simply 30 seconds.
Utilizing pressurised fuel additionally provides the benefit that these tender robots can function in locations the place electronics would require complicated safety and shielding. Future instructions might contain printable fuel containers and the mixing of mechanisms for responsive steering. With such developments, maybe robots received’t simply be strolling on air – they’ll be driving and flying on it.
Featured Picture Credit score: David Baillot/College of California San Diego